The Battlefield Detection Problem
The modern battlefield has fundamentally changed. A platoon commander may no longer first encounter the enemy through gunfire, armour, or artillery. Instead, the first sign of danger may be the faint electric whine of quadcopter motors overhead — a radar contact too small to classify, or a fleeting RF signature that disappears before operators can react.
In recent conflicts, small unmanned aerial systems and coordinated drone swarms have demonstrated an uncomfortable truth: traditional air defence architectures were not designed to reliably detect, classify, and engage low-altitude micro aerial threats operating in cluttered urban terrain.
A fighter aircraft is large, hot, fast, and radar-visible. A quadcopter carrying a grenade between buildings is none of those things.
A drone swarm approaches at 30–60 metres altitude, weaving between rooftops and transmission poles. The commander has seconds to decide: Is this a bird? A friendly UAV? A civilian drone? A loitering munition? Or the leading edge of a saturation attack? No single sensor can tell him. That is the problem sensor fusion was built to solve.
Why Single-Sensor Systems Fail
Modern drones exploit the weaknesses of individual sensors deliberately. Each modality has a critical blind spot — and adversaries engineer platforms to exploit exactly those gaps.
| Sensor Type | Strength | Critical Limitation |
|---|---|---|
| Radar | Long-range, all-weather volumetric search | Struggles with small RCS, urban clutter, bird discrimination |
| RF Detection | Identifies control links, pilot geolocation | Ineffective against autonomous / EMCON-silent drones |
| Acoustic Arrays | Passive; effective in NLOS urban canyons | Limited range; degraded by wind and ambient city noise |
| EO / IR Optics | High-confidence visual ID and payload assessment | Weather, lighting, and LOS dependent |
No sensor independently provides reliable battlefield-grade detection. Hence modern C-UAS systems employ sensor fusion engines to combine all modalities into a single, coherent air picture.
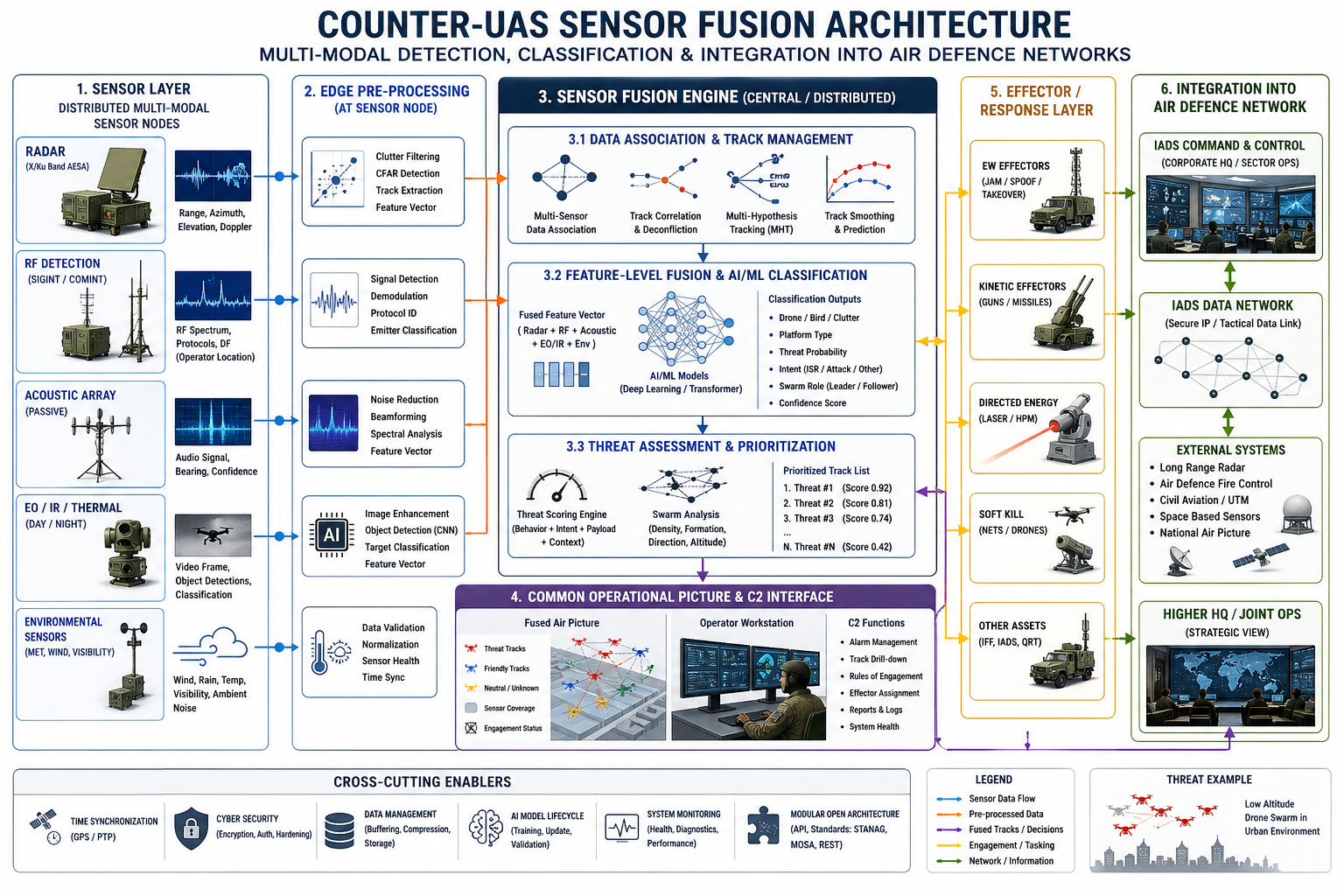
The Fusion Architecture
A modern C-UAS fusion architecture follows a layered processing pipeline. Each stage refines raw sensor data into an increasingly confident threat assessment.
Layer 1 — Distributed Multi-Modal Detection Grid
X/Ku-band AESA or FMCW radars for volumetric search, range/azimuth/elevation extraction, Doppler velocity, and swarm density estimation.
Passive wideband receivers monitoring 2.4/5.8 GHz ISM bands, telemetry links, GNSS emissions, and frequency-hopping signatures for drone fingerprinting and operator geolocation.
Beamformed microphone arrays detecting rotor signatures. Especially valuable in dense urban canyons where radar LOS is blocked. Passively cues EO systems.
Visual confirmation, target classification, payload assessment, and battle damage verification. The final layer of identity confirmation.
Layer 2 — Edge Pre-Processing
Raw sensor data is never fused directly. Each sensor node performs local preprocessing before passing data upstream — reducing bandwidth, latency, and fusion engine load.
- Radar — micro-Doppler rotor blade signature analysis
- RF — protocol decoding and modulation fingerprinting
- EO/IR — CNN-based image classification at the edge
- Acoustic — spectrogram and harmonic decomposition
Layer 3 — The Fusion Engine
This is where true C-UAS capability resides. The fusion engine combines detections from all modalities into a single coherent track file using a combination of algorithms:
Combines independent processed sensor tracks. Used when sensors output track files rather than raw measurements.
Combines raw measurements before track generation. Higher fidelity output but computationally intensive — used where latency budgets allow.
Deep learning models ingest multimodal feature vectors — micro-Doppler, RF spectrum, optical imagery, acoustic harmonics — to output threat probability and swarm behaviour assessment.
Advanced architectures increasingly use transformer-based fusion networks, treating multimodal sensor streams as token sequences — the same architectural principle that underpins large language models, applied to battlefield threat classification.
Why Fusion Changes Outcomes
Consider a short-range air defence operator defending a mechanised battlegroup. His radar detects twelve intermittent low-speed tracks at four kilometres.
- Operator may assume bird clutter
- Engagement decision delayed
- Swarm reaches weapon release point
- First awareness: visual at 200 m
- RF sensors confirm simultaneous datalink activity
- Acoustic sensors detect rotor harmonics
- EO system confirms quadcopter silhouettes
- Fusion engine: threat confidence 94%
- SHORAD/DEW assets cued at 5 km
That difference in confidence determines whether troops survive the next 90 seconds. It is not a marginal improvement. It is the difference between point defence and early interdiction.
"The most sophisticated jammer or interceptor is irrelevant if the sensor fusion architecture cannot produce a trustworthy air picture first."
Design Principles for Effective C-UAS Fusion
Distributed Sensor Geometry
Urban clutter creates LOS gaps no single-point sensor can overcome. Sensors must be spatially distributed across elevated radar towers, rooftop EO nodes, street-level acoustic arrays, and perimeter RF direction-finding nodes — creating overlapping detection cones with no dead ground.
Precision Time Synchronisation
Fusion is impossible without timestamp alignment. GPS-disciplined oscillators, PTP/IEEE-1588 Precision Time Protocol, or network time synchronisation must be deployed across all nodes. Even 10–20 ms drift can degrade track correlation for fast-moving targets.
Confidence-Based Decision Logic
Each sensor contributes a weighted confidence score. The fusion engine escalates only when a composite threshold is crossed — preventing false engagements while ensuring rapid response to genuine threats.
RF Correlation: 0.80
Acoustic Match: 0.55
EO Confirmation: 0.95
Composite Threat Score: 0.88 → ESCALATE
Open Architecture Middleware
Modular, API-driven middleware with STANAG-compatible interfaces prevents vendor lock-in and enables plug-and-play sensor upgrades as the threat evolves — critical in a domain where adversary tactics change faster than procurement cycles.
Swarm-Specific Architectural Challenges
Drone swarms are not simply "many drones." They introduce fusion problems that single-target architectures were not designed to handle.
Closely spaced drones create merged radar returns. Requires multi-hypothesis tracking, track-splitting algorithms, and swarm centroid decomposition.
Fusion engine must estimate payload probability, flight path intent, swarm leadership nodes, and kamikaze vs ISR drone roles to assign limited effectors correctly.
Adversaries may spoof RF signatures, GNSS data, or inject false emitters. Fusion architecture must avoid single-source trust bias — no single sensor should determine threat classification alone.
Integration into the Broader Air Defence Network
A standalone C-UAS system is tactically useful. An integrated C-UAS system is operationally transformative. Modern doctrine increasingly treats counter-drone as a discipline within the Integrated Air Defence System (IADS) rather than a separate stovepipe capability.
What Integration Enables
Drone tracks appear alongside aircraft, helicopters, missiles, and friendly UAVs in a single integrated display — enabling coherent command decisions.
IFF integration and UAV corridor management prevent engagement of blue-force systems — critical as friendly UAS density on the battlefield increases.
Fusion engine auto-cues EO/IR trackers, EW jammers, directed energy weapons, and gun/missile SHORAD batteries — with human-in-the-loop oversight maintained.
The sensor fusion layer feeds into the local C-UAS command post, SHORAD fire control systems, the integrated AD C2 network, and higher-echelon air picture compilation — shifting the capability from point defence to networked low-altitude battlespace dominance.
Where the Architecture Is Heading
Next-generation C-UAS fusion architectures are moving rapidly toward four capabilities that will define the next decade of low-altitude air defence.
Predict swarm route and target intent before the attack develops — shifting from reactive detection to proactive interdiction.
Every vehicle, soldier node, and infrastructure tower contributes sensor data to a distributed mesh — vastly expanding coverage without centralised infrastructure.
Sensor nodes classify threats locally before network transmission, reducing latency from seconds to milliseconds and maintaining capability under network degradation.
Detect → Classify → Prioritise → Assign Effector, with human-in-the-loop oversight maintained as a governance layer rather than a speed constraint.
Final Analysis
Counter-UAS is no longer a niche add-on to the air defence order of battle. It is becoming a core discipline — one that determines whether ground forces can operate, manoeuvre, and sustain themselves under persistent low-altitude threat.
The real challenge is not merely detecting drones. It is detecting them early, classifying them correctly, prioritising them intelligently, and integrating the response into the broader kill chain before the swarm crosses the engagement threshold.
For the soldier on the ground, this means the difference between reacting to a drone visually at 200 metres, and receiving an automated warning while it is still five kilometres out. For the commander, it means shifting from point defence to networked low-altitude battlespace dominance.
"No sensor fusion architecture, however sophisticated, can substitute for the fundamental engineering discipline of getting the sensor geometry, time synchronisation, and data quality right at the source."
And for defence architects, it surfaces a hard truth that applies equally to C-UAS and to every complex integrated system: the confidence of the output is only ever as good as the quality of the inputs feeding the engine.
Key Takeaways
- Low-altitude drone detection in urban terrain cannot rely on any single sensor modality.
- Effective C-UAS requires fusion of radar, RF, acoustic, and EO/IR data into a single coherent track file.
- Fusion engines use probabilistic tracking, AI/ML classification, and confidence-weighted decision logic.
- Distributed sensor geometry is essential to overcome urban LOS gaps and clutter.
- C-UAS must integrate into existing IADS networks — not remain a standalone stovepipe.
- Swarm defence introduces advanced requirements in track deconfliction, target prioritisation, and EW deception resistance.